the Architecture of MultiTasking in Linux
linux进程和线程的关系
在linux中,“进程”即若干个共享虚拟内存空间(共享代码段和数据段,堆栈各自独有)、共享文件和设备的“线程”的集合。
严谨地讲,linux中任务的粒度是thread,而不是process。在linux中,task_struct是和thread一一对应,而不是和process一一对应!
进程的主线程的spid作为进程pid。新进程(主线程)是由父进程通过fork系列系统调用来创建,新线程则由同进程内其他线程pthread_create()创建。init task和kthreadd task在内核加载启动的时候由系统idle task创建。 user task均是init(pid=1)的子孙,kernel task都是kthreadd(pid=2)的子孙。
因此,不同于其他人的叙述,下面我将多处使用“task”来表示一个线程,即一个任务主体。
user task VS kernel task
两者性质上相同,在竞争资源的时候都是按照统一的规则(CPU的优先级)来竞争。
user task都是直接或间接由用户启动触发,而kernel task多数由内核自动触发,也可由user task触发。
user task在“内核态”时内存限制在内核区,在“用户态”时内存限制在用户区。kernel task内存始终限制在内核区,其task_struct->mm为NULL。
kernel task常用的有:
[kswapd0]:根据页低阈值(min_free_bytes)的配置,定期回收内存
[ksoftirqd]:处理软中断的内核线程,每个CPU都有一个,当看到此线程对CPU使用率较高时,意味着系统在进行大理的软中断操作,性能会有问题
[kworker]:用于执行内核工作队列,分为绑定 CPU (名称格式为 kworker/CPU86330)和未绑定 CPU(名称格式为 kworker/uPOOL86330)两类。
[migration]:在负载均衡过程中,把进程迁移到 CPU 上。每个 CPU 都有一个 migration 内核线程。
task生命周期的设计
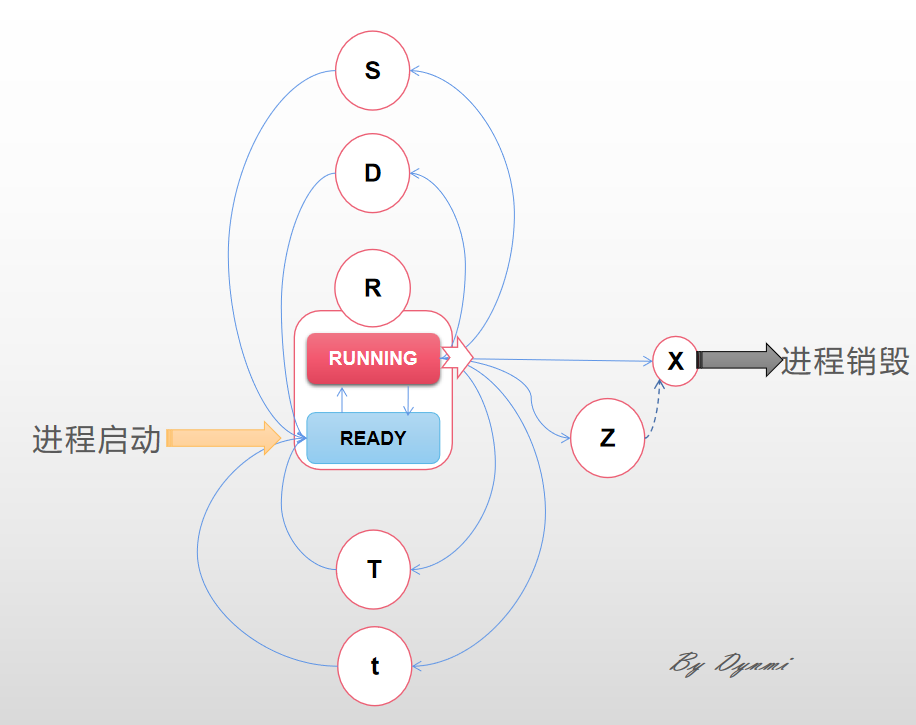
当一个thread被启动,首先是TASK_RUNNING状态,被加入就绪队列中等待被调度到CPU执行。
各状态的出现频率从高到低依次是:
TASK_RUNNING(R):进一步分为RUNNING态和READY态。RUNNING即正在占用CPU,READY即未占有CPU,等待条件满足被分配CPU。
TASK_INTERRUPTIBLE(S):进程的主状态就是R态,S态可视为进程暂时等待的状态,一经召唤就立刻转入R态。
TASK_UNINTERRUPTIBLE(D):通常是在等待IO,比如磁盘IO,网络IO,其他外设IO,如果进程正在等待的IO在较长的时间内都没有响应,那么就被ps看到了,同时也就意味着很有可能有IO出了问题,可能是外设本身出了故障,也可能是比如挂载的远程文件系统已经不可访问了。被其他进程的wake_up()唤醒。
TASK_STOPPED(T):R状态的任务收到SIGSTOP时转入T状态,临时暂停。T状态的任务收到SIGCONT时转入t状态,继续执行。
TASK_TRACED(t):被追踪的状态,task暂停。比如在gdb中对被跟踪的进程下一个断点,进程在断点处停下来的时候就处于task_traced状态。而在其他时候,被跟踪的进程还是处于前面提到的那些状态。
EXIT_ZOMBIE(Z):若父进程销毁时还有存活的子进程,子进程会更改PPID为1,即被init进程接管。反之,子进程退出时会给父进程发送SIGCHLD信号,父进程收到SIGCHLD后销毁子进程,删除其task_struct,这需要父进程中显示调用wait来完成。如果子进程已退出而父进程尚未调用wait为其收尸,则该进程进入僵尸状态。
EXIT_DEAD(X):task销毁前的很短暂的一个状态,几乎无法被ps捕捉到。
多任务间如何通信
信号signal
信号是异步的,一个task不必通过任何操作来等待信号的到达,只需要在进程中设置信号相应的处理函数,当有信号到达的时候,由系统异步触发相应的处理函数即可。
struct task_struct {
...
int sigpending;
...
struct signal_struct *sig;
sigset_t blocked;
struct sigpending pending;
...
}
成员 sigpending 表示进程是否有信号需要处理(1表示有,0表示没有)。成员 blocked 表示被屏蔽的信息,每个位代表一个被屏蔽的信号。成员 sig 表示信号相应的处理方法。
信号量semaphores
二元信号量/ 计数信号量/ 读者写者信号量, 在内核区维护,无法直接被用户进程访问
共享内存shared_memory
将同一块用户区内存空间分别映射到多个task的VM表里。多个task需要通过信号量等来互斥地操作同一块内存。
锁
多任务间如何分配调度CPU
因为CPU核心数«待执行任务数,因此需要优越的CPU分配调度算法,以平衡多个task的CPU占用。
每个CPU的就绪队列细分为5个优先级队列,从高到底依次是
- deadline_sched_class
- stop_sched_class
- rt_sched_class
- fair_sched_class
- idle_sched_class
每当一个task的现有时间片全部用完,即将它从active队列移动到相应优先级的expired队列并重新分配时间片。直到所有task都被移动到expired队列,便将active队列和expired队列指针交换。
task_struct::policy
task_struct::policy决定了task的调度优先级策略。
- SCHED_NORMAL 分时任务;基于红黑树的完全公平调度算法;每次重新获取时间片只得到少量,自己阻塞或者现有时间片耗尽时,主动放弃CPU;
- SCHED_RR 实时任务;每次重新获取时间片只得到少量,自己阻塞或者现有时间片耗尽时,主动放弃CPU;
- SCHED_FIFO 实时任务;自己阻塞时,主动放弃CPU;
task创建时policy默认继承父进程的policy,顺便提一句,init和kthreadd的policy都是SCHED_OTHER。task可以调用sched_setscheduler()来修改其调度优先级策略。后面也可以用chrt命令修改task的调度优先级策略。
时间片的获得与消耗
时间片(task_struct::time_slice)的获取发生在两个场景:
- task刚被fork创建:时间片是其父进程的一半。
- task主动或被动地放弃CPU,移入就绪队列的expired队列中:普通task根据它的task_struct::static_prio,实时task根据它的task_struct::rt_priority来重置时间片。优先级越高,分配的时间片越多。我们知道可以通过修改nice来修改普通进程的优先级,注意nice只对应static_prio。
#define NICE_TO_PRIO(nice) (MAX_RT_PRIO + (nice) + 20)
每次时钟中断,都会将当前进程的剩余时间片减一。
schedule()
schedule()函数完成任务CPU调度的工作。 schedule()流程:
- 关闭当前 CPU 的抢占功能;
- 如果当前 CPU 的运行队列中不存在任务,调用 idle_balance 从其他 CPU 的运行队列中取一部分执行;
- 调用 pick_next_task 依次访问五个优先级的active队列,找到优先级最高的任务;
- 调用 context_switch 切换运行的上下文,包括寄存器的状态和堆栈;
- 重新开启当前 CPU 的抢占功能;
schedule()是如何被执行的?
- 抢占调度。请注意,一个task在进行系统调用(内部触发)和中断(外设触发)时都只是调用内核API而已,此时还是该task在CPU上运行着,只是从“用户态”转到了“内核态”。
- 时钟中断固定调用schedule_tick()来检查是否需要抢占,需要则将TIF_NEED_RESCHED置真,中断处理结束返回时若TIF_NEED_RESCHED为真则调用schedule()。
- RUNING中的task通过wake_up()系统调用去唤醒其他阻塞态task将其加入就绪队列时,调用schedule_tick()来检查是否需要抢占,需要则将TIF_NEED_RESCHED置真,系统调用结束返回时若TIF_NEED_RESCHED为真则调用schedule()。
- 非抢占调度
- RUNNING中的task主动放弃CPU(如自己阻塞、时钟中断递减时间片发现耗尽、收到SIGSTOP信号、进程销毁)切换到其他状态时,schedule()会被调用。
- 用户态自行调用schedule()